常见问题解答(FAQ)
本文档收集了使用 Fourier-GRX-N1 SDK 时常见的问题和解决方案。如果您遇到的问题未在此列出,请联系技术支持。
硬件问题
电池充电充不进去
问题描述:机器人插线充电充不进去。充了很久,一上电机器仍然自动断电了。
解决方案:
- 检查充电线是否正确稳定连接到充电口
- 检查充电器是否正常工作(显示红灯或蓝灯为充电状态,绿灯充满电)
- 检查电池开关按钮是否按下,只有按下状态,电池才会充电。否则是电源线只给机器人供电,不给电池充电。
- 检查是否保险丝烧断。
- 保险丝在电池盒内,打开电池盒后可以看到保险丝的状态
- 如果烧断了,需更换保险丝
安装问题
安装过程中断
问题描述:程序安装过程中由于意外或操作失误导致的安装程序退出。
解决方案:
- 重新运行安装程序即可,旧有安装内容会被清理掉
机型配置失败
问题描述:运行安装程序过程中请求输入数字以配置机型,但输入后报配置错误,退出安装。
解决方案:
- 检查输入的 数字 是否正确,不是输入具体的选项名称
- 重启安装程序后重新配置
初始化问题
配置文件错误
问题描述:机器人初始化失败,提示配置文件错误
解决方案:
- 确认机器人型号是否配置正确,参见 固件安装和更新
- 重启机器人后重试
IMU 初始化失败
问题描述:机器人 initialize 失败,提示找不到 IMU 设备

解决方案:
- 检查 IMU 连接线是否正确连接到机器人主控板
- 确认 IMU 设备是否损坏
- 重启机器人后重试
执行器自检失败
问题描述:机器人 self-check 失败,提示无法访问指定 IP 的执行器
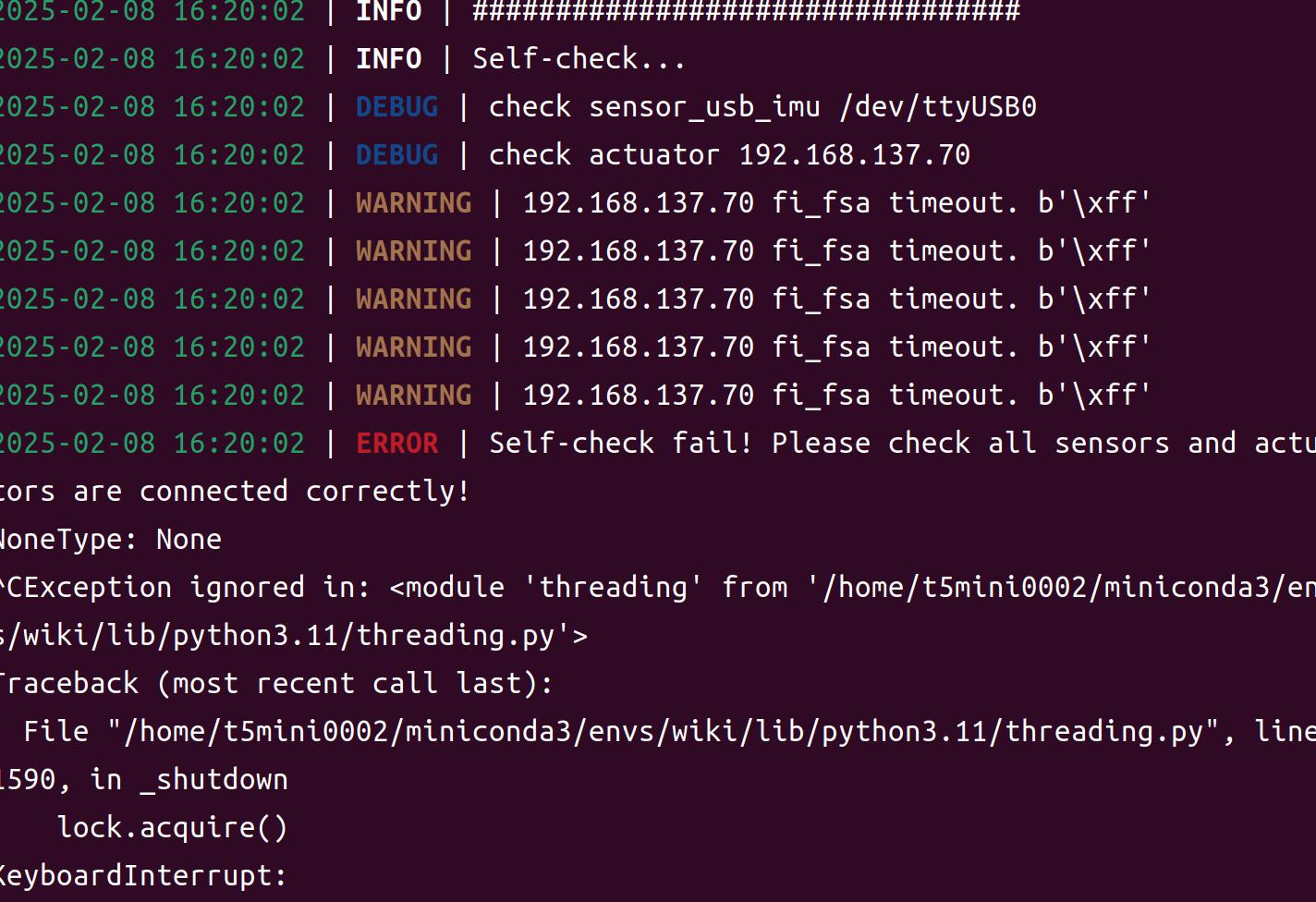
解决方案:
- 检查执行器电源状态(应显示紫色呼吸灯)
- 确认有线网络连接和静态 IP 配置
- 检查线路连接完整性
IMU 数据异常
问题描述:机器人初始化成功,但 IMU 数据异常,一直报错


解决方案:
- 检查 IMU 连接线是否正确连接到机器人主控板
- 检查是否 fourier-grx 程序重复启动 (重复启动,会竞争设备权属,导致数据出错)
- 终端输入
ps -ef | grep fourier-grx查看是否有多个 fourier-grx 进程 - 杀死已启动的 fourier-grx 程序:
sudo killall fourier-grx - 重新启动 fourier-grx 程序
- 终端输入
- 检查是否配置了 fourier-grx 开机自启动
- 终端输入
crontab -e,查看是否配置了 fourier-grx 开机自启动 - 如果配置了,可终端运行
fourier-grx disable_service关闭开机自启动 - 重启机器人控制电脑 💻
- 终端输入
网络配置
外网访问配置
问题:如何配置机器人访问外网?
解决方案:
-
通过有线网口连接外部网络
-
配置步骤:
# 1. 切换到动态IP(访问外网时)
sudo nmcli connection modify "有线连接" ipv4.method auto
# 2. 切换回静态IP(使用机器人时)
sudo nmcli connection modify "有线连接" ipv4.method manual \
ipv4.addresses 192.168.137.220/24
# 3. 重启网络服务
sudo systemctl restart NetworkManager
WiFi 热点配置
问题:如何关闭 WiFi 热点自启动?
解决方案:
# 临时关闭
sudo systemctl stop rocs-wifi
# 永久关闭
sudo systemctl disable rocs-wifi
# 重启生效
sudo reboot
性能相关
控制频率说明
- 用户接口(User API):
- 控制频率:50Hz
- 状态输出:50Hz
- 指令接收:50Hz
- 开发者接口(Developer API):
- 数据更新频率:可配置,默认 400Hz(最高可配置为 500Hz)
- 算法运行频率:可配置,建议不超过数据更新频率
超时警告处理
问题描述:程序报 Timeout 警告
解决方案:
- 关闭 IPv6(主控电脑和局域网内其他设备)
- 检查执行器连接线是否松动
- 监控网络延迟和丢包情况
手柄休眠问题
问题描述:手柄不操作一段时间会出现休眠,休眠后无法再重新连上机器人进行控制。
解决方案:
- 尝试使用判断休眠等待时间更长,或者是可以配置无休眠的手柄
- 例如:Gamesir 的 G8+ Pro 手柄
- 例如:北通星闪手柄
- 重连手柄后重启机器人控制程序
开发环境问题
用户接口通信问题
问题:user 测试程序无法正常通信
解决方案:
- 确认网络配置:
- Zenoh 优先使用有线端口
- 避免同时连接有线和无线网络
- 检查网络连接状态
- 确认 SDK 版本兼容性
依赖问题
问题:ImportError: GLIBC_2.33 not found
解决方案:
- 安装必要的编译工具:
sudo apt update
sudo apt install build-essential
- 系统要求:
- 推荐:Ubuntu 22.04 LTS
- 最低:支持 GLIBC 2.33 的 Linux 发行版
最佳实践
- 开发环境准备
- 使用推荐的操作系统版本
- 正确配置网络环境
- 安装所有必要依赖
- 网络配置
- 开发时使用静态IP
- 需要外网时切换到动态IP
- 定期检查网络连接状态
- 故障排查
- 查看日志文件
- 检查硬件连接
- 监控系统资源
获取帮助
如果您遇到未在此文档中列出的问题:
- 查看开发文档
- 检查日志更新
- 联系公司技术支持:xin.chen@fftai.com